 江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
产品展示
product

 产品简介
产品简介
机器人运动控制器是控制机器人运动的关键部件,它负责将预定的控制方案、规划指令转变成期望的机械运动,实现机器人高精度、高速度、高可靠性的运动控制。
product
产品分类18852653955
机器人运动控制器FlexiBots Pro
1.1应用场景
工业生产:机器人在工业生产中被广泛应用,可以用于物料搬运、喷涂、焊接等重复性工作和高精度加工领域,如汽车、电子、机械制造、食品生产等。
医疗领域:机器人在医疗领域也有广泛的应用,如手术机器人能够医生进行高
精度的手术操作,提高手术成功率和效果,同时减少手术风险和术后疼痛。
农业领域:机器人能够帮助农民完成种植、采摘、打药等工作,提高了种植效率,并且可以减少人力卫生隐患。
物流领域:机器人可以帮助物流行业完成搬运、堆垛、分类等工作以及快递等配送服务。
总之,机器人作为一种重要的自动控制装置,在各个领域中都得到了广泛的应用。随着机器人技术的不断发展和完善,机器人也将会在未来的科技领域中发挥更加重要的作用。
1.2应用部署
1)控制机器人固定安装在生产线:

图1-1 工业生产机器人
2)控制机器人安装在移动平台:

图1-2 医用手术机器人
二、主要功能
实现机器人运动控制,其控制流程一般都是由计算机生成控制命令发送给机械臂。通过对机械臂动力学建模和系统辨识等理论研究,可以使机械臂具有高精度的运动控制能力,从而实现精细加工、精确定位、高速组装等任务。
1.运动控制:这是机器人控制的基础,确保末端执行器(如抓手、工具等)能够准确到达预定的位置点,并沿着预定的移动路径进行运动。通过精确控制末端执行器的运动速度和加速度,机器人能够在保证运动稳定性的同时,实现快速、高效的作业。这包括设定和调节机器人各关节的运动速度、加速度和减速度,确保运动平滑且符合工艺要求;
2.传感器监测:传感器能够实时检测工作环境的变化和机器人自身的状态。传感器控制模块负责传感器的配置、采集和处理,确保机器人能够准确感知外部环境,并根据感知结果调整自身的运动状态。
3.数据处理:机器人控制系统中的数据处理模块对传感器采集的数据、机器人运动数据以及通信控制数据进行处理。这个模块的主要任务是将不同的数据进行融合,把获得的数据进行处理后输出符合要求的数据,使机器人能够根据复杂的工作环境变化处理和分析大量数据,提高作业效率和准确性;
4.通信控制:机器人控制系统中的通信控制模块负责机器人与外部环境进行通信和数据传输。这个模块能够使机器人能够与其他系统(如PLC等)进行有效的通信和数据交换,实现远程监控和控制功能。
5.系统配置扩展:用户可以根据应用需求调整机器人参数,如最大速度、加速度、轨迹精度等,以满足不同的作业要求
6.安全防护:机器人控制系统还具备多种安全防护功能,如急停、限位等。这些功能能够在机器人出现异常或危险情况时迅速停止运动,防止人员伤害和设备损坏。同时,机器人还符合国际和行业安全标准,确保机器人系统的安全性。
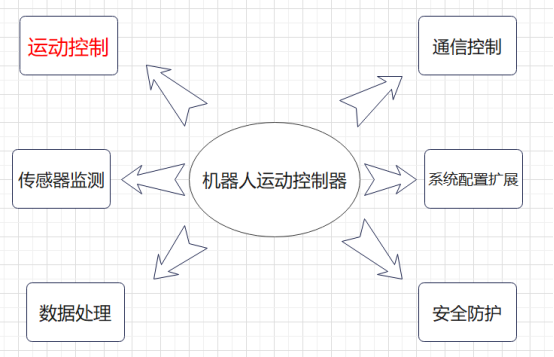
功能架构图
三、结构组成
为了实现上述的功能,机器人运动控制器需要具备相应的硬件组成。我们以机械臂机器人为例,如图3-1所示,机器人运动控制器主要由机械结构、伺服电机、传感器、功能插口、PLC控制柜组成。

机械臂机器人
底座由伺服电机1控制转向,大臂由伺服电机3控制,伺服电机2控制小臂与大臂夹角(与大臂伺服电机3配合),功能插口(机械手)处由伺服电机4控制。
由计算机发出控制指令,通过PLC与传感器控制伺服电机启动停止、归零复位、前进后退、速度调整、点动自动、精确限位定位等,从而控制机器人。
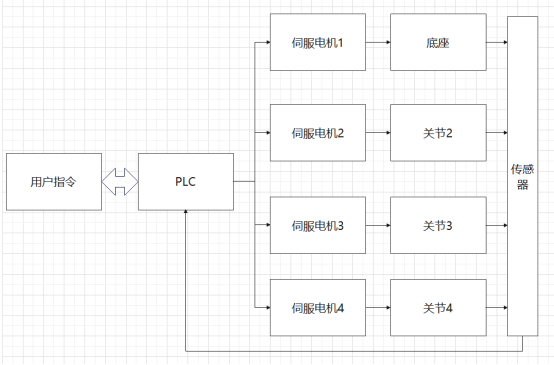
控制原理框架
四、接线图
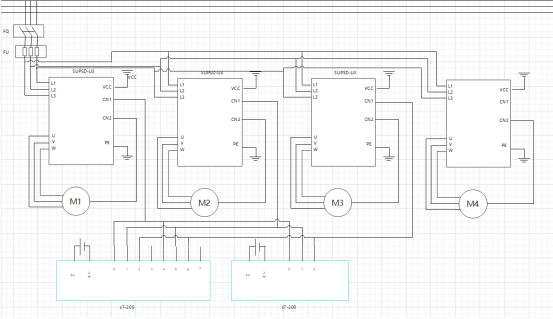
电气接线图
五、参数性能分析
1)定位限位精度
对控制机器人传感器定位限位精度造成影响的因素,大致分为统误差、随机误差和粗大误差。系统误差是设备本身固有的,可以通过校准和补偿来减少;随机误差由不确定性因素引起,可以通过统计方法处理;粗大误差则是由异常或故障引起的,需要通过软件滤除或硬件修复;除此以外,传感器具有更高的精度,这也大大提升了定位限位精度。
2)控制精度分析
伺服电机是一种能够精确控制位置、速度和加速度的电机,它通常用于需要高精度和快速响应的自动化系统中。SM-M4和130ST伺服电机通过接收来自控制器(如PLC或伺服驱动器)的信号来调整其输出,以实现对机械部件的精确控制。
六、用户软件
软件部分:
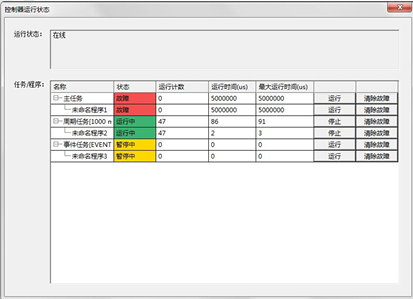
机器人控制器调试程序
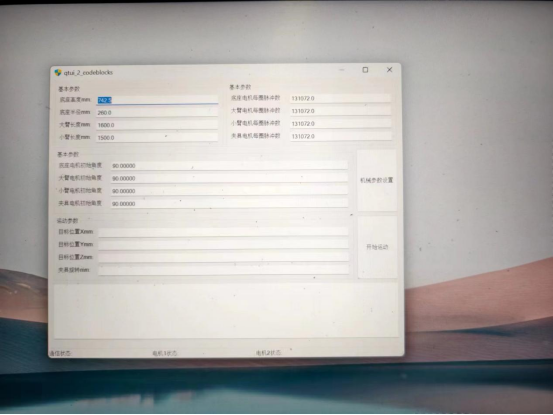
用户软件
打开操作界面,待其启动后将自动加载并显示操作界面,点击“设置初始参数”按钮修改设置底盘高度等初始参数。初始参数设定完毕后,确保准备工作无误,在“运动参数”栏填写所需要进行的运动坐标。点击“开始运动”按钮以启动或停止过程,查看指示灯以了解系统状态等。
在线留言

 上一篇:
上一篇: 返回列表
返回列表
