 江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
产品展示
product


 产品简介
产品简介
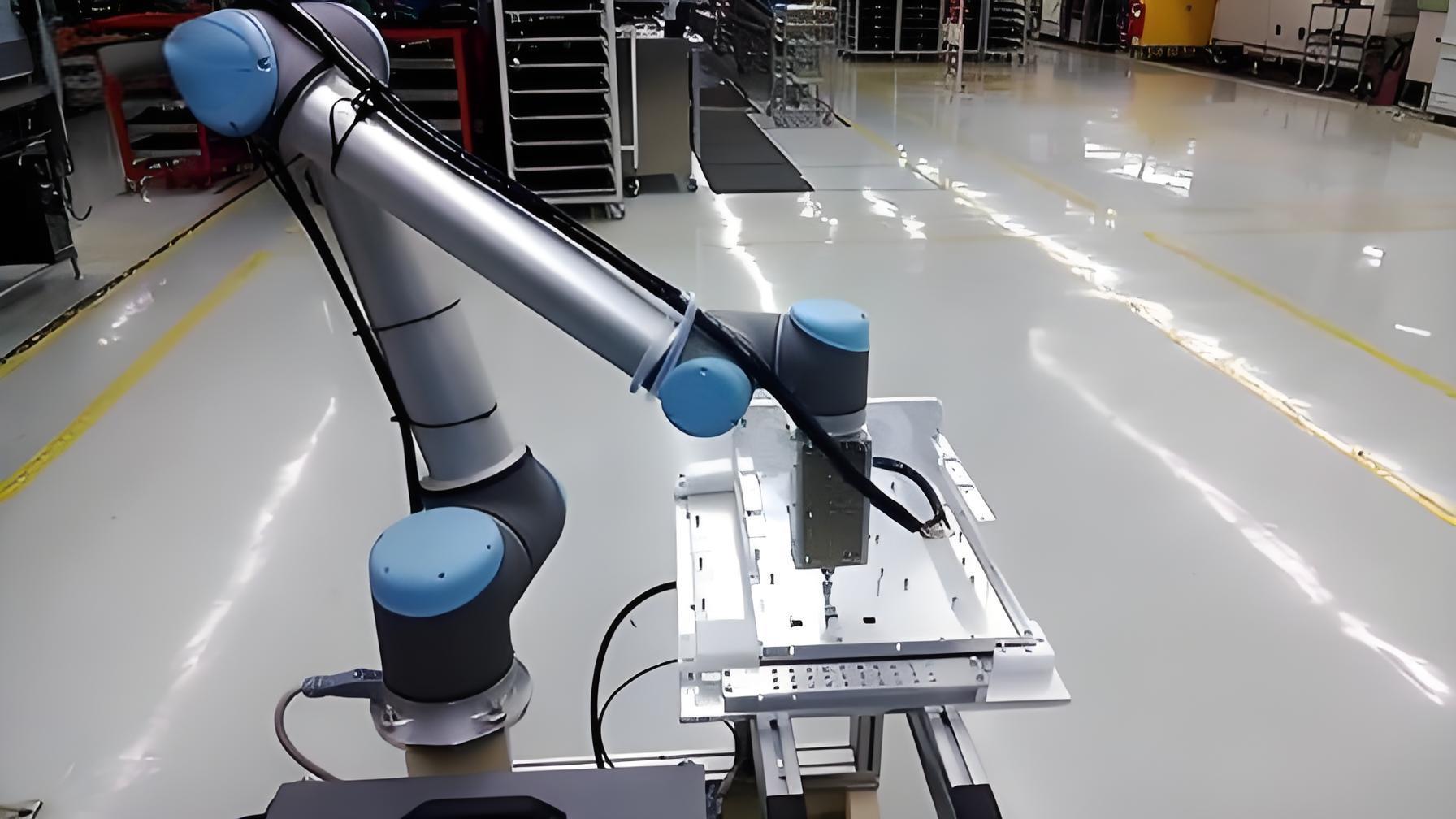
拧螺丝机器人是一种专门用于自动化拧紧螺丝的机器人系统。它们广泛应用于制造业,尤其在装配线上,用于快速、准确地拧紧各种类型和规格的螺丝,确保生产效率和产品质量。一
18852653955
拧螺丝机器人是一种专门用于自动化拧紧螺丝的机器人系统。它们广泛应用于制造业,尤其在装配线上,用于快速、准确地拧紧各种类型和规格的螺丝,确保生产效率和产品质量。
一、应用场景
拧螺丝机器人,也称为自动锁螺丝机或自动拧紧机器人,在工业自动化领域有着广泛的应用场景。以下是其主要应用场景的详细介绍:
1. 消费电子产品组装
应用实例:
- 在手机、平板电脑、笔记本电脑等消费电子产品的组装过程中,需要对大量精密部件进行螺丝紧固。
优势:
- 拧螺丝机器人能够快速、准确地完成这些任务,特别是在高精度螺丝紧固方面,极大提高了生产效率和产品质量。
2. 家用电器生产
应用实例:
- 在空调、冰箱、洗衣机、电视等家用电器的生产线上,用于固定外壳、内部组件和电路板。
优势:
- 减少人工误差,提升组装速度,确保产品的安全性和稳定性。
3. 机械设备与精密仪器装配
应用实例:
- 各种机械设备、精密仪器、医疗器械等产品装配过程中,螺丝连接是不可或缺的部分。
优势:
- 拧螺丝机器人能够确保高精度的螺丝紧固,提高产品的整体性能和可靠性。
4. 汽车制造业
应用实例:
- 在汽车及汽车零部件的制造过程中,拧螺丝机器人被广泛应用于发动机、底盘、车身等部件的紧固。
优势:
- 自动化拧紧螺丝不仅提高生产效率,还能确保各部件的紧固质量,从而提升汽车的整体性能和安全性。
5. 航空航天领域
应用实例:
- 在飞机和航天器的部分结构件和系统设备的组装过程中,需要精确而高效的螺丝紧固操作。
优势:
- 拧螺丝机器人具备高精度、高速度、耐高温、耐振动等特点,能够满足航空航天领域对产品质量和可靠性的严格要求。
6. 家具制作
应用实例:
- 在板式家具、办公家具等产品的组装过程中,可以使用拧螺丝机器人来提高组装效率。
优势:
- 减少人工劳动强度,提高生产速度,确保家具的组装质量。
7. 包装机械与印刷设备
应用实例:
- 在包装机械和印刷设备的构造中,许多部位通过螺丝连接。
优势:
- 利用拧螺丝机器人可以减少人工误差并提升组装速度,提高设备的整体性能。
8. 玩具与模型拼装
应用实例:
- 在塑胶玩具、电动玩具以及模型拼装等领域,也可能采用自动锁螺丝技术来提升组装效率。
优势:
- 提高生产效率,降低生产成本,确保产品的组装质量。
二、主要功能
1.自动拧紧螺丝。它们通过准确的感应和控制系统,能够快速地识别螺丝位置并进行拧紧操作,从而实现了生产线的自动化。
高效性:
- 相较于人工操作,拧螺丝机器人在拧紧速度和准确性方面都有显著提升,大大提高了生产效率。
稳定性:
- 在长时间连续作业中,拧螺丝机器人能够保持稳定的拧紧力度,确保每颗螺丝都牢固地固定在产品中,避免了由于拧紧不当而带来的质量问题。
2. 处理不同螺丝的固定点
灵活性:
- 拧螺丝机器人在设计时考虑到了灵活性,能够在工作空间内灵活旋转,处理多个螺丝固定点。这意味着它们可以适应不同形状和大小的产品,以及不同位置和角度的螺丝固定点。
适应性:
- 无论是面对较小的区域还是有一定深度的区域,拧螺丝机器人都能根据需求进行调整,以便更好地完成任务。这种适应性使得它们能够广泛应用于各种生产线。
3. 移动轻便
轻量化设计:
- 拧螺丝机器人通常采用轻质材料制造,重量较轻,这使得它们不需要额外的大型设备或固定装置就能轻松安装和移动到不同的工作位置。
便捷性:
- 在使用时,可以根据需要快速调整机器人的位置和角度,以适应不同的生产环境和任务需求。
4. 智能控制与检测
智能控制系统:
- 拧螺丝机器人配备有智能控制系统,可以根据预设的程序进行工作,并实时监测螺丝的拧紧状态和产品质量。
检测功能:
- 在拧紧过程中,设备内置的传感器会实时监测螺丝的拧紧扭矩、角度变化以及是否到位,以判断螺丝是否已正确安装并达到预设工艺要求。一旦发现不良状况(如滑牙、漏锁、过紧等),机器人会立即停止作业并报警,确保产品质量。
5. 协作与安全性
协作性:
- 拧螺丝机器人作为协作机器人的代表,可以在人类工人的指导下进行工作,为人工作业提供有力支持。它们能够与人类工人共同作业于同一条生产线上,提高整体生产效率。
安全性:
- 这些机器人还采用了更加智能化的安全系统,一旦检测到异常情况(如工人进入危险区域等),会立即停止动作,以保障工作人员的安全。
三、结构组成
1. 机器人本体
- 机械臂:这是拧螺丝机器人的主体结构,通常由多个关节和连杆组成,能够实现多自由度的灵活运动。机械臂的末端通常配备有专门的螺丝拧紧装置,如电动螺丝刀或气动螺丝刀。
- 驱动系统:为机械臂提供动力的系统,可以是电机、液压或气压驱动。驱动系统负责控制机械臂的运动速度和位置精度。
2. 螺丝供给系统
- 螺丝存储装置:用于存放待拧紧的螺丝,可以是振动盘、滚筒式供料器或直线送料器等。这些装置能够确保螺丝在需要时能够顺利地被机器人抓取。
- 螺丝输送机构:将螺丝从存储装置输送到机器人末端的拧紧装置中。这通常涉及到一些精密的机械结构和传动装置。
3. 工件定位系统
- 工件夹持装置:用于固定待拧紧螺丝的工件,确保工件在拧紧过程中不会移动或变形。夹持装置的设计通常根据工件的形状、大小和材质进行调整。
- 定位传感器:用于检测工件的位置和姿态,确保机器人能够准确地将螺丝拧紧到指定的位置。常见的定位传感器包括激光测距仪、视觉传感器等。
4. 控制系统
- 主控制器:负责接收来自各个传感器的信息,进行数据处理和决策,然后控制机械臂的运动和螺丝拧紧装置的操作。主控制器通常具有强大的计算能力和存储能力。
- 运动控制器:用于控制机械臂的运动轨迹和速度,确保机器人能够按照预定的路径和速度进行运动。运动控制器通常与主控制器紧密配合,实现精确的运动控制。
- 人机交互界面:用于操作员与机器人进行交互,如设置参数、监控状态等。人机交互界面通常具有友好的用户界面和易于操作的功能。
5. 视觉系统(可选)
- 相机:用于拍摄工件表面的图像,识别螺丝孔的位置和特征。相机通常安装在机械臂的末端或附近,以确保能够捕捉到清晰的图像。
- 图像处理算法:用于处理相机拍摄的图像,识别螺丝孔的位置和特征,并将这些信息反馈给控制系统。图像处理算法能够处理各种复杂的图像信息,如光照变化、阴影干扰等。
- 综上所述,拧螺丝机器人的结构组成包括机器人本体、螺丝供给系统、工件定位系统、控制系统以及可选的视觉系统等多个部分。这些部分相互协作,共同实现螺丝的自动化拧紧操作,提高生产效率和产品质量。
下面将描述一下拧螺丝机器人的一些性能指标:
性能指标 | 描述 |
自由度 | 5 |
载荷能力 | 8KG |
定位精度 | 定位精度0.1mm |
工作半径 | 938mm |
典型功耗 | 225W |
重复定位精度 | 0.02mm |
安装方式 | 任意角度 |
工具I/O | 4xDO/4xDI (可配置)、1xAI 、1xAO |
工具I/O供电 | 12 V/24 V,3 A (三针模式), 2 A (双针模式), 1 A (单针模式) |
工具通信 | RS485 |
在线留言

 返回列表
返回列表