 江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
机器人智联智能控制器FlexiBots AI

 产品简介
产品简介
智联控制器:利用视觉系统实现机器人智能控制,并配备智联控制器接口。例如控制机器人的拧螺丝、取螺丝的运动和操作。
一、应用行业及其场景
1. 3C电子制造领域
电子产品组装:在电子产品的制造过程中,如手机、电脑、照相机、DVD等,需要大量的螺丝固定。拧螺丝机器人能够快速、准确地将螺丝拧上电子产品的外壳,保证产品的安全性和稳定性。
典型应用:
(1)需要机器视觉等智能算法引导机器臂多自由度运动,例如拧螺丝机器人(找到螺丝)
(2)需要机器视觉等智能算法引导机器人自主移动,例如扫地机器人(避障前进)
2. 航空航天领域
设备装配与维修:航空航天设备对精度和可靠性要求极高,拧螺丝机器人以其高精度、高速度、耐高温、耐振动等特点,在航空航天设备的装配和维修中发挥着重要作用。
应用实例:各类航空航天部件的紧固,如飞机发动机、机翼等关键部件的螺丝、销钉拧紧。各种导弹部件连接螺丝、蒙皮销钉的安装与拆卸。
3. 汽车制造领域
车身与部件装配:汽车制造过程中,车身、车门、座椅等部件的装配都需要用到拧螺丝机器人。它们能够确保汽车的各部件紧固,提高汽车的安全性和稳定性。应用具体场景:如汽车车灯、发动机、进气格栅、动力电池包等螺丝拧紧场景,大族机器人等品牌的拧螺丝机器人已在此类场景中得到了高效应用。
4. 机械装备与仪器仪表
拧螺丝机器人在机械装备领域主要用于各种机械设备、精密仪器等的装配过程中,实现螺丝的自动拧紧。这些机械设备可能包括重型机械、自动化设备、生产线上的各种工装夹具等。部分机械装备需要在高温或振动环境下工作,拧螺丝机器人能够适应这些特殊环境,确保螺丝的紧固效果。
应用具体场景:要用于各类精密仪器、测量设备、控制设备等的装配和维修过程中
5. 家具与电器制造
五金制品:如门窗、锁具等产品的制造过程中,也需要大量的打螺丝操作。拧螺丝机器人能够显著提高生产效率和质量。
家具与电器制造:在这些行业中,同样存在大量的螺丝固定需求,拧螺丝机器人的应用可以大大提升生产效率和产品质量。
6. 应用部署
1) 拧螺丝机器人安装在小型工作台:

图1.1 五金制作机器人
2)拧螺丝机器人安装在生产线
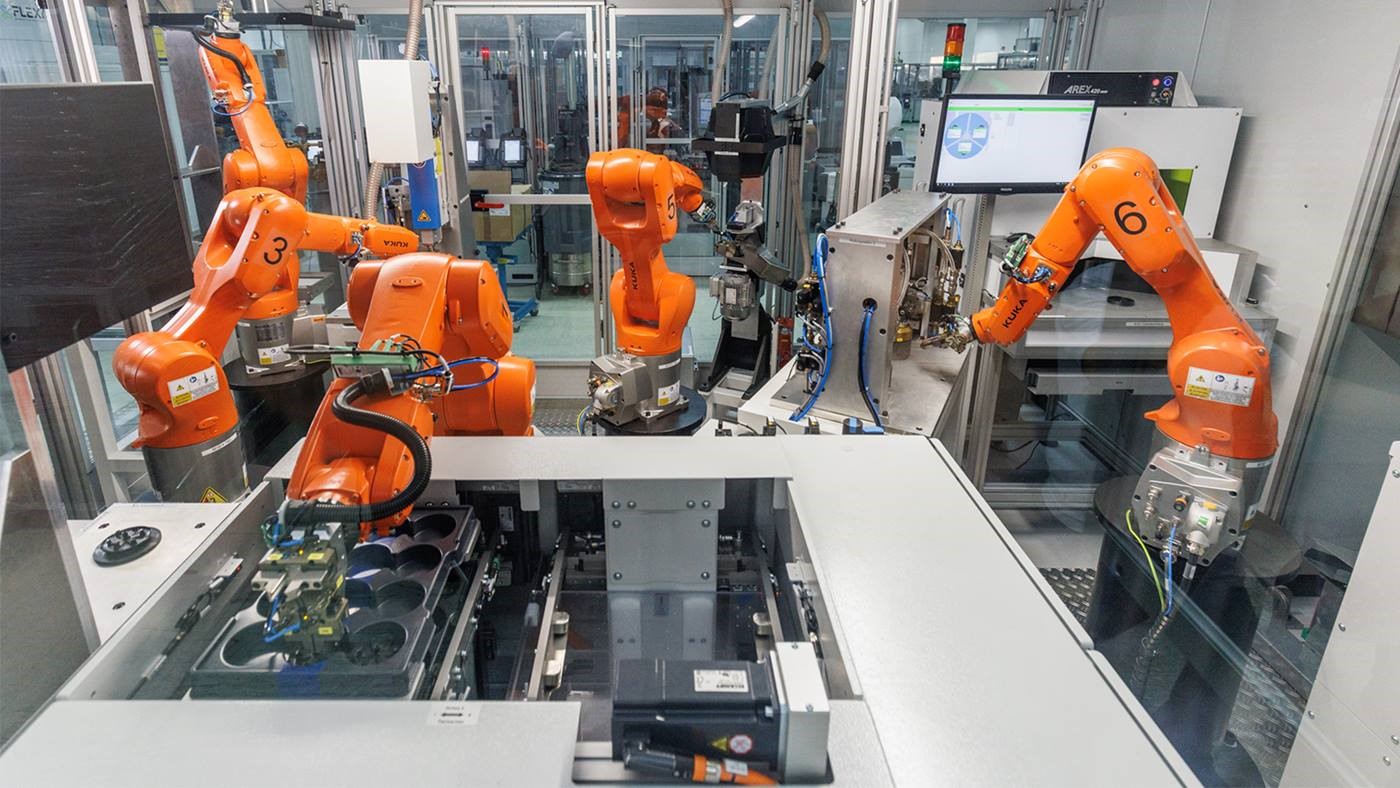
图1.2 工业安装机器人
3)拧螺丝机器人安装在移动平台
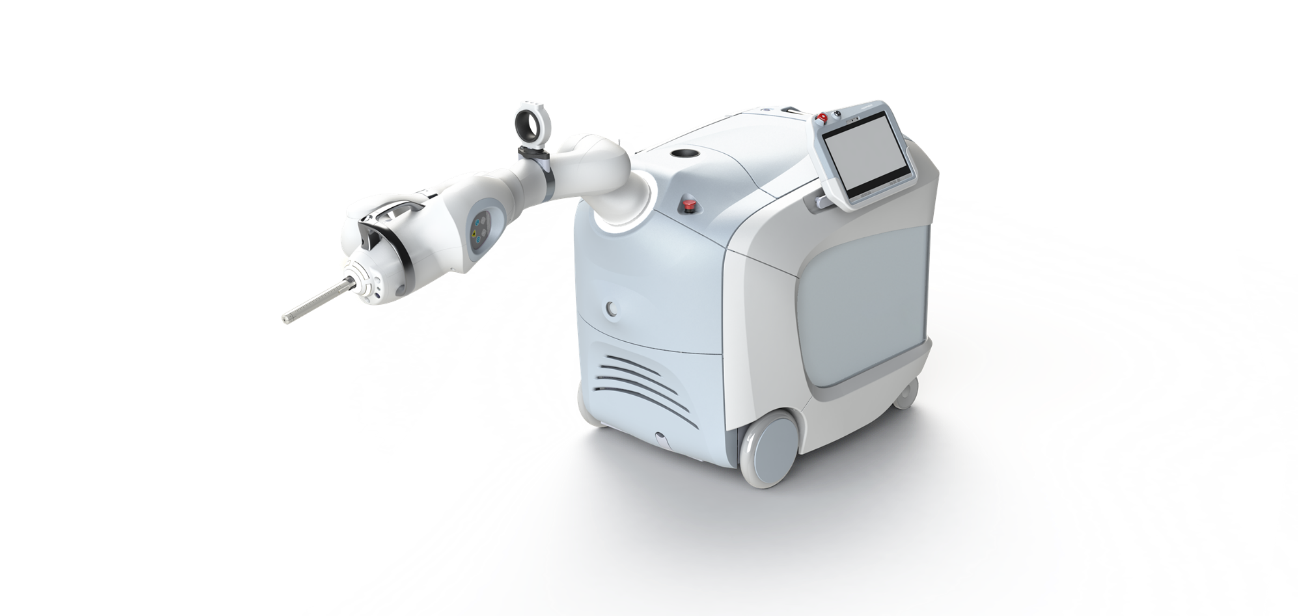
图1.3 医用设备机器人
二、主要功能
2.1控制器
智联控制器:接收视觉系统和传感器的信息,进行决策和规划,控制机器人的拧螺丝、取螺丝的运动和操作。
运动控制器:控制多轴关节式结构的机械臂运动,实现精确定位,多自由度的运动和以适应不同位置和角度的螺丝拧紧需求。
2.2传感器
图像传感器、相机、位移传感器、扭矩传感器等,用于检测机器人和工件的状态,确保安全和可靠的操作。
2.3视觉系统
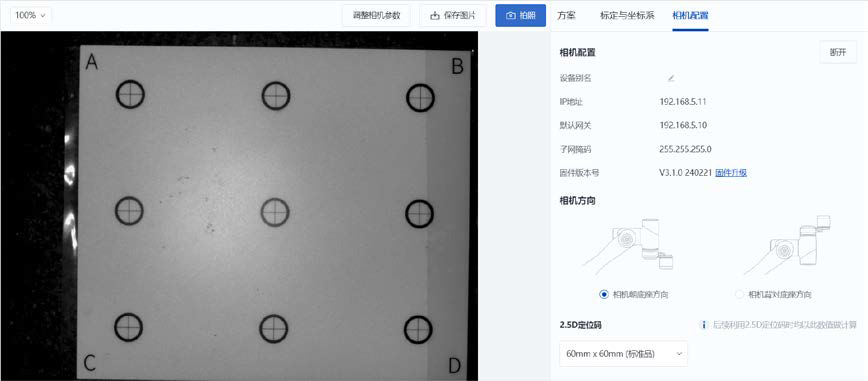
相机图像处理:拍摄工件表面的图像对传输的图像进行处理,识别螺丝孔的位置和特征。
定位算法:将图像中的螺丝孔位置转换为机械臂的坐标系,为机械臂提供精确的运动轨迹。
2.4用户监控系统
控制软件:用于集成化、可视化管理机器人的操作,包括编程、监控和故障排查等功能。
用户界面:提供友好的人机交互界面,允许操作人员设置参数、监控状态和接收报警信息。
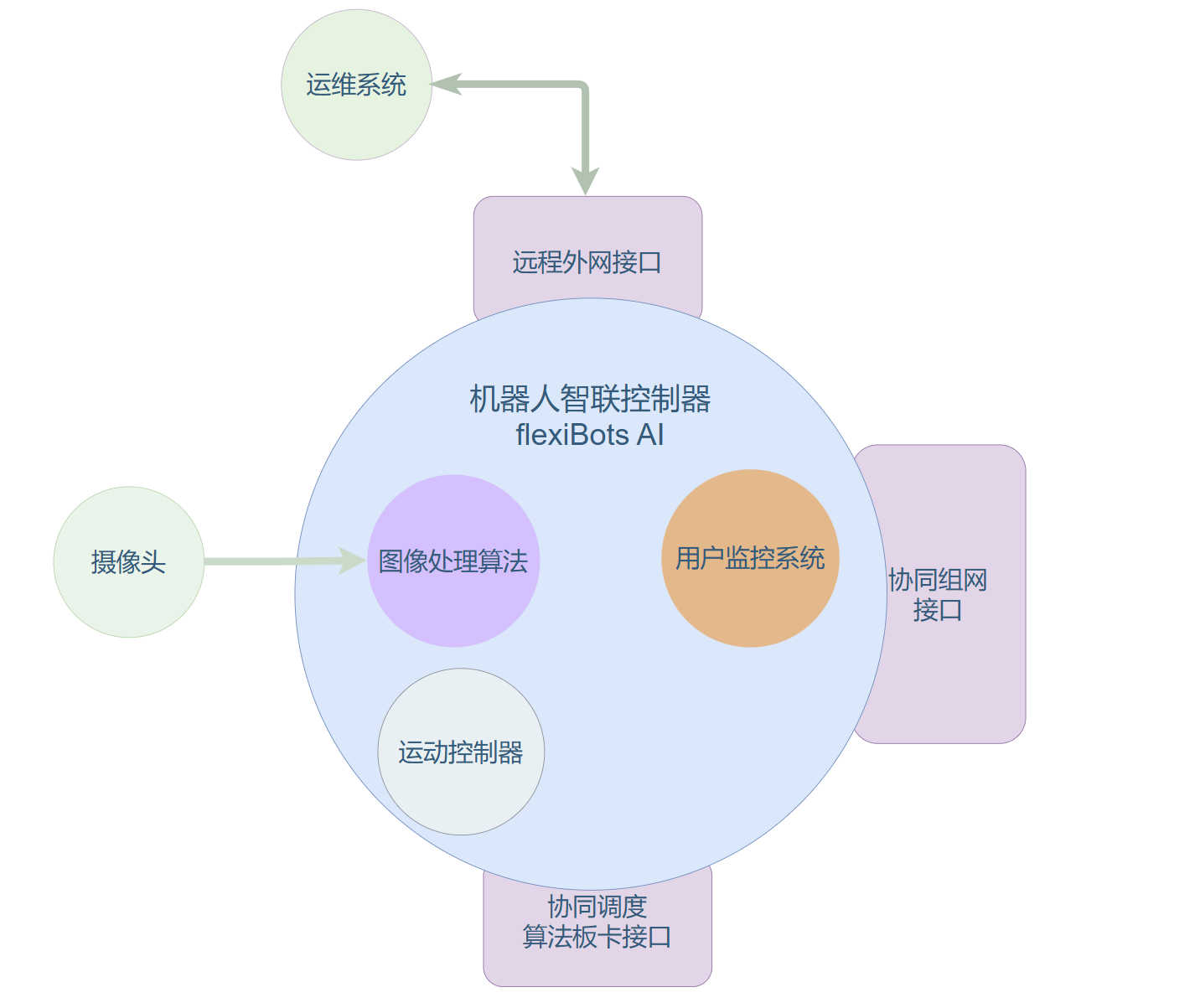
图2.1 控制器功能框图
三、结构组成
拧螺丝机器人智联控制器flexiBots AI是通过高度集成的送料、定位、拧紧及检测技术,实现了螺丝自动化的高效、精准装配,即拧紧、拆卸,并分为两种:拧螺丝机器人控制器和取螺丝机器人控制器。实现上述的功能,机器人智联控制器需要具备相应的硬件组成。机器人智联控制器主要由以下几点组成
3.1. 拧螺丝机器人控制器结构组成
3.1.1. 机器人本体控制
多自由度机器人运动控制(见其它文档)
3.1.2. 供料系统控制
通过滚筒、钩螺丝、振动盘、涡轮等方式将散乱的螺丝进行整列和排序,确保螺丝按照正确的方向和顺序排列。
吹气式供料通常使用压缩空气将螺丝吹送到吸嘴或导管中,适用于轻巧且形状适合的螺丝。
吸附式供料则通过负压吸附螺丝,并将其送至指定位置。
3.1.3. 螺丝输送与定位控制
整理好的螺丝由输送机构准确无误地输送到螺丝锁紧装置(如电动或气动驱动的拧紧枪)的前端。
在这一过程中,可能包括光学或者机械传感器来检测螺丝的位置和状态,确保螺丝能够正确对准待装配的产品孔位。
3.1.4. 螺丝拧紧控制
螺丝拧紧机构包含旋转动力部分,即伺服电机或气缸等提供转动力矩,精确控制螺丝扭紧的扭矩和角度。
当螺丝接触到产品时,会自动执行预设的拧紧程序,保证螺丝达到合适的紧固程度。
3.1.5. 过程监控与质量检测控制
锁付过程中,设备内置的传感器实时监测螺丝的拧紧扭矩、角度变化以及是否到位,以判断螺丝是否已正确安装并达到预设工艺要求。
若发生不良状况,如滑牙、漏锁、过紧等情况,机器人会立即停止作业并报警,确保产品质量。
3.1.6. 信号反馈与控制系统
整个工作流程由控制系统协调,每个步骤完成后发送信号给下一个工序,实现连续自动化作业。
控制系统可编程设定多种锁付模式,适应不同的生产需求和产品规格。
3.2. 取螺丝机器人控制器结构组成
3.2.1. 机器人本体控制
多自由度机器人运动控制(见其它文档)
3.2.2. 取螺丝控制
使用机器人内置的传感器、相机或其他视觉系统来定位螺丝的位置。这可能需要机器人先进行一定的扫描或图像处理,以确定螺丝的准确坐标。
使用抓取工具或吸盘等设备,机器人手臂根据坐标移动到螺丝孔的上方或侧面取出螺丝。
3.2.3. 螺丝放置盘控制
取到螺丝后放入螺丝放置盘中,由输送机地送到存储盒中并进行计数。在这一过程中,可能包括光学或者机械传感器来检测螺丝的位置和状态,确保螺丝能够分类正确。
3.2.4. 过程监控与质量检测控制
取螺丝过程中,设备内置的传感器实时监测螺丝的角度变化以及是否抓取成功,以判断螺丝是否已成功取出。
若发生不良状况,如螺丝取不出、螺丝断裂等情况,机器人会立即停止作业并报警,确保产品质量。
3.2.5. 信号反馈与控制系统
整个工作流程由控制系统协调,每个步骤完成后发送信号给下一个工序,实现连续自动化作业。
控制系统可编程设定多种取螺丝模式,适应不同的生产需求和产品规格。
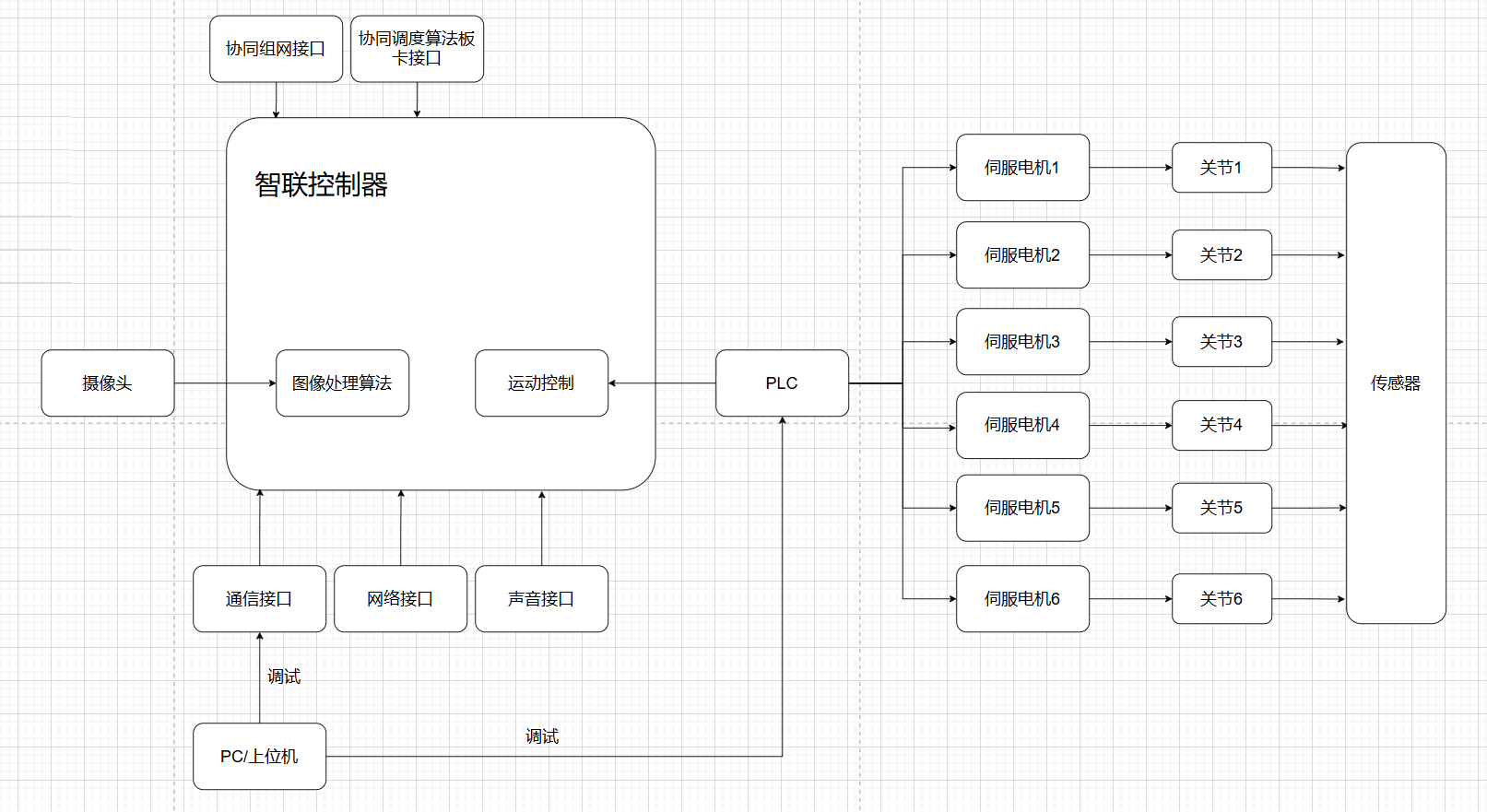
图3.1 控制原理框架
四、接线图
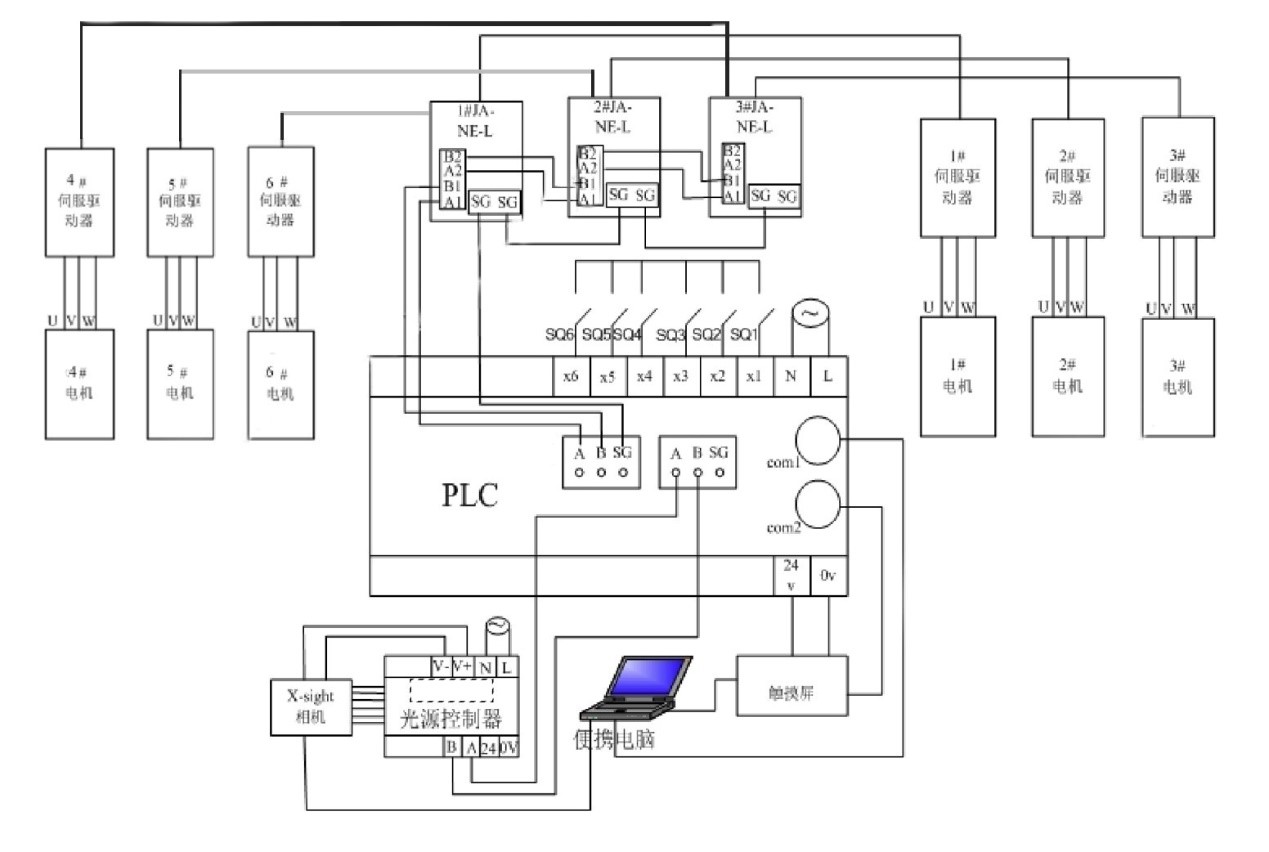
图4-1 接线
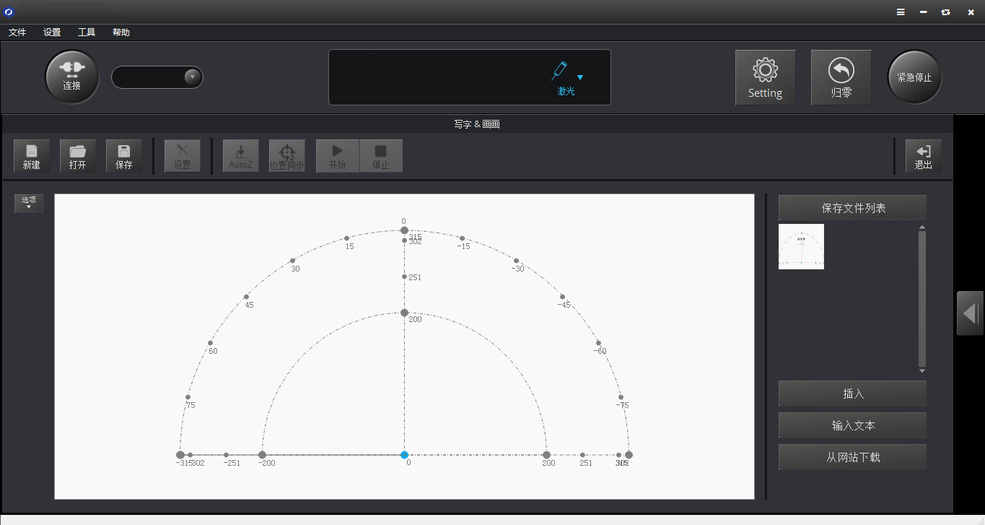
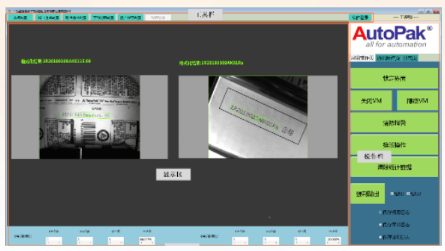
五、软件部分
用户可通过软件进行操作和查看工作状态

在线留言

 上一篇:
上一篇: 返回列表
返回列表