 江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
机器人智联运动控制器FlexiBots Pro



 产品简介
产品简介
立柱机器人控制器是用于控制立柱式机器人的核心设备,其功能类似于其他类型机器人的控制器,但针对立柱式机器人的特点进行了优化和定制。以下是立柱机器人控制器的一般描述
18852653955
一、应用场景
1. 物料搬运与码垛
· 应用描述:立柱机器人控制器能够精确控制机器人的运动轨迹和力度,实现物料的快速、准确搬运和码垛。在饲料、化工、饮料、啤酒、塑料、耐火材料等行业,立柱机器人广泛应用于纸箱、袋装、灌装、盒装、瓶装等各种形状成品的装箱和码垛。
· 优势:提高生产效率,降低人力成本,减少物料损耗,确保码垛质量。
2. 生产线自动化
· 应用描述:立柱机器人控制器与生产线上的其他自动化设备协同工作,实现生产线的全自动化。在农资粮贸行业,立柱机器人被用于化肥、尿素等农资产品的生产、包装和运输等环节,以及粮食的收购、储存、运输等环节,实现物料的快速、准确搬运和包装。
· 优势:提升生产效率,降低人力成本,确保产品质量和生产安全。
3. 货物搬运与装卸
· 应用描述:立柱机器人控制器在物流行业中发挥着重要作用,能够实现货物的快速、准确搬运和装卸。在仓库、码头、机场等物流节点,立柱机器人能够替代人工完成繁重、复杂的搬运任务。
· 优势:提高物流效率,降低人工成本,减少货物损坏和人员受伤的风险。
4. 智能仓储系统
· 应用描述:立柱机器人控制器与智能仓储系统相结合,实现货物的自动化存取和库存管理。通过精确的路径规划和运动控制,立柱机器人能够准确地将货物送达指定位置,提高仓储管理的效率和准确性。
· 优势:优化仓储布局,提高空间利用率,降低库存成本,提升物流服务水平。
5. 危险环境作业
· 应用描述:在化工、冶金等存在高温、高压、有毒等危险因素的环境中,立柱机器人控制器能够控制机器人完成危险环境下的作业任务,如物料搬运、设备检修等。
· 优势:保障人员安全,减少事故风险,提高作业效率。
6. 高精度作业
· 应用描述:在需要高精度作业的领域,如精密制造、半导体生产等,立柱机器人控制器通过精确的运动控制和力度控制,实现微小零件的精确装配和加工。
· 优势:提高产品精度和一致性,降低废品率,提升产品质量。
综上所述,立柱机器人控制器的应用场景涵盖了工业生产、物流行业以及特殊场景等多个领域。随着科技的不断进步和应用领域的不断拓宽,立柱机器人控制器的应用前景将更加广阔。
二、主要功能
1.运动控制:这是机器人控制的基础,确保执行器能够准确到达预定的位置点,并沿着预定的移动路径进行运动。通过精确控制末端执行器的运动速度和加速度,机器人能够在保证运动稳定性的同时,实现快速、高效的作业。这包括设定和调节机器人各关节的运动速度、加速度和减速度,确保运动平滑且符合工艺要求;
2.传感器监测:传感器能够实时检测工作环境的变化和机器人自身的状态。传感器控制模块负责传感器的配置、采集和处理,确保机器人能够准确感知外部环境,并根据感知结果调整自身的运动状态。
3.数据处理:机器人控制系统中的数据处理模块对传感器采集的数据、机器人运动数据以及通信控制数据进行处理。这个模块的主要任务是将不同的数据进行融合,把获得的数据进行处理后输出符合要求的数据,使机器人能够根据复杂的工作环境变化处理和分析大量数据,提高作业效率和准确性;
4.通信控制:机器人控制系统中的通信控制模块负责机器人与外部环境进行通信和数据传输。这个模块能够使机器人能够与其他系统(如PLC等)进行有效的通信和数据交换,实现远程监控和控制功能。
5.系统配置扩展:用户可以根据应用需求调整机器人参数,如最大速度、加速度、轨迹精度等,以满足不同的作业要求
6.安全防护:机器人控制系统还具备多种安全防护功能,如急停、限位等。这些功能能够在机器人出现异常或危险情况时迅速停止运动,防止人员伤害和设备损坏。同时,机器人还符合国际和行业安全标准,确保机器人系统的安全性。
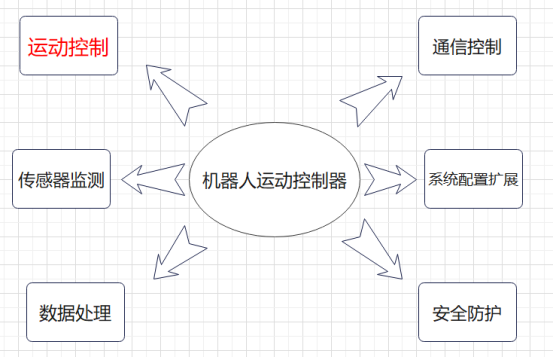
功能架构图
三、结构组成
立柱机器人控制器的结构组成通常可以从硬件和软件两个方面来阐述。以下是详细的说明:
1. 控制器主板:
· 功能:控制器主板是立柱机器人控制器的核心部件,负责整个系统的逻辑运算、信号处理和运动输出。
· 特点:主板上集成了各种电路和芯片,以实现复杂的控制算法和高速的数据处理。
2. 输入输出模块:
· 功能:输入输出模块负责与外界设备的通信和数据传输。它接收来自传感器的输入信号,并将控制信号输出到机器人的执行机构。
· 组成:包括传感器接口、电机驱动器接口等,用于连接不同类型的传感器和执行器。
3. 电源模块:
· 功能:电源模块为控制器提供稳定可靠的电力供应,确保控制器及其连接的传感器和执行器能够正常工作。
· 特点:电源模块通常具有过压保护、过流保护等安全功能,以保证系统的稳定运行。
4. 传感器:
· 类型:包括内部传感器和外部传感器。内部传感器用于感知机器人自身的状态,如关节位置、速度和加速度等;外部传感器用于感知工作环境和工作对象的状态,如视觉传感器、力觉传感器等。
· 功能:传感器是机器人感知外界环境的重要手段,为控制器提供必要的反馈信息。
5. 执行机构接口:
· 功能:执行机构接口用于连接机器人的执行机构,如电机、气缸等,以实现机器人的运动控制。
1. 控制程序:
· 功能:控制程序是机器人控制器的核心部分,它直接控制机器人的运动和工作。控制程序包括运动轨迹规划算法、关节伺服控制算法等,用于实现机器人的精确控制。
· 特点:控制程序通常采用模块化设计,便于维护和升级。同时,它支持多种编程语言,以适应不同的应用需求。
2. 机器人系统管理程序:
· 功能:机器人系统管理程序负责整个机器人系统的管理和监控,包括系统初始化、故障诊断、性能优化等。
· 特点:系统管理程序具有友好的用户界面和强大的功能,使得用户可以方便地操作和维护机器人系统。
3. 通信接口:
· 功能:通信接口用于实现机器人与其他设备或系统的信息交换。常见的通信接口包括串行接口、并行接口、Ethernet接口和Fieldbus接口等。
特点:通信接口支持多种通信协议和标准,以确保机器人能够与其他设备或系统无缝连接。
四、接线图

电气接线图
五、参数分析
电机与伺服驱动器均选用台达B3系列,该系列产品是台达以电子核心技术为准,根据不同的应用和客户所研发的产品。拥有以下优势:
1.高性能:台达B3系列电机与伺服器具有优秀的性能指标,包括高速度、高精度和高响应性,能够满足各种精密控制需求。
2.高可靠性:台达B3系列产品采用高质量的材料和先进的制造工艺,具有较高的可靠性和稳定性,能够长时间稳定运行。
3.灵活性:台达B3系列电机与伺服器支持多种通信接口和网络协议,可以与各种控制器和设备实现无缝连接,提高系统的灵活性和扩展性。
4.易于集成:台达B3系列产品具有友好的用户界面和易于操作的软件工具,使其易于集成到现有系统中,并且易于安装和调试。
5.质量保证:台达作为知名的工业自动化品牌,拥有丰富的经验和良好的售后服务体系,能够为用户提供可靠的产品质量保证和技术支持。
PLC作为核心控制元件,选择用西门子S7-1200 DC/DC/DC型号,该系列PLC具有以下优势:
1.处理器性能:32位CPU,高速运算能力和响应速度。
2.内存容量:通常具有128KB内存容量,可根据需要扩展至1MB。
3.数字输入/输出:通常具有16个数字输入/输出通道,可根据需要扩展。
4.模拟输入/输出:通常具有2个模拟输入和1个模拟输出通道,可根据需要扩展。
5.通信接口:支持以太网、PROFINET等通信接口,可与其他设备和系统进行通信。
6.工作温度范围:通常能够在0-55摄氏度的工作温度范围内稳定运行。
7.支持的编程语言:支持多种编程语言,包括图形化编程语言和结构化文本编程语言。结合两者的强大功能,可以实现为用户定制自动化控制的需求。
PLC与伺服的强大功能可以实现将用户想要知道/需要知道的参数在上位机界面中展示,这样可以实现用户对电机状态把控(如,电机温度状态,电机运行状态等状态信息获取)以及对自动化流程的把控盒控制。
在立柱机器人控制器中,通过MODBUS通讯协议将工位电机和PLC建立起了实时连接,通过对台达绝对型电机和伺服的控制,工作人员通过上位机操纵,可以实时检测电机运行状态以及自动化流程状态,实现对立柱机器人的远程监控和自动控制。
六、用户软件

人机交互界面
在线留言

 上一篇:
上一篇: 返回列表
返回列表
