 江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
机器人智联运动控制器FlexiBots Pro



 产品简介
产品简介
拧螺丝机器人控制器是拧螺丝机器人的核心部件之一,负责监控、调度和控制机器人的运动和操作。以下是拧螺丝机器人控制器的一般描述:1. 主控制器:主控制器是拧螺丝机器
18852653955
一、应用场景
拧螺丝机器人控制器作为拧螺丝机器人的核心部件,其应用场景广泛,主要集中在需要高精度、高效率螺丝拧紧作业的领域。
1、电子产品组装,在电子产品的制造过程中,如手机、电脑、照相机、DVD等,需要大量的螺丝固定。拧螺丝机器人能够快速、准确地将螺丝拧上电子产品的外壳,保证产品的安全性和稳定性。
2、航空航天:航空航天设备对精度和可靠性要求极高,拧螺丝机器人以其高精度、高速度、耐高温、耐振动等特点,在航空航天设备的装配和维修中发挥着重要作用。
3、汽车制造:汽车制造过程中,车身、车门、座椅等部件的装配都需要用到拧螺丝机器人。它们能够确保汽车的各部件紧固,提高汽车的安全性和稳定性。
4、机械装备与仪器仪表:拧螺丝机器人在机械装备领域主要用于各种机械设备、精密仪器等的装配过程中,实现螺丝的自动拧紧。这些机械设备可能包括重型机械、自动化设备、生产线上的各种工装夹具等。部分机械装备需要在高温或振动环境下工作,拧螺丝机器人能够适应这些特殊环境,确保螺丝的紧固效果。应用部署
1、拧螺丝机器人安装在小型工作台:

安装在小型工作台
2)拧螺丝机器人安装在生产线:

安装在生产线
3)拧螺丝机器人安装在移动平台:
安装在移动平台
二、主要功能
智联控制器:接收视觉系统和传感器的信息,进行决策和规划,控制机器人的拧螺丝、取螺丝的运动和操作。
运动控制器:控制多轴关节式结构的机械臂运动,实现精确定位,多自由度的运动和以适应不同位置和角度的螺丝拧紧需求。
图像传感器、相机、位移传感器、扭矩传感器等,用于检测机器人和工件的状态,确保安全和可靠的操作。
相机图像处理:拍摄工件表面的图像对传输的图像进行处理,识别螺丝孔的位置和特征。
定位算法:将图像中的螺丝孔位置转换为机械臂的坐标系,为机械臂提供精确的运动轨迹。
控制软件:用于集成化、可视化管理机器人的操作,包括编程、监控和故障排查等功能。
用户界面:提供友好的人机交互界面,允许操作人员设置参数、监控状态和接收报警信息。
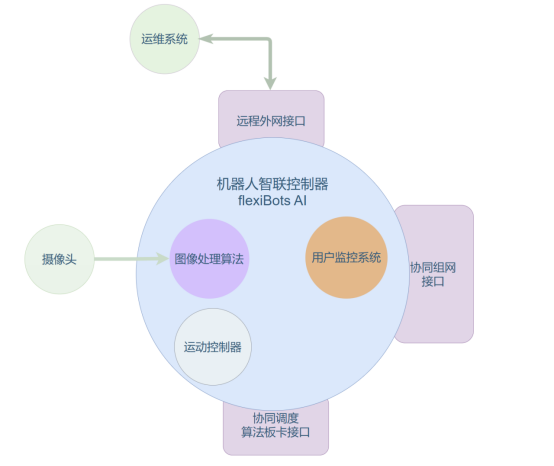
控制器功能框图
综上所述,拧螺丝机器人控制器作为自动化生产线的关键组件,不仅提高了生产效率和产品一致性,还通过智能化管理和数据分析,进一步优化了制造流程。选择合适的控制器对于确保整个拧螺丝系统的性能至关重要。
三、结构组成
控制原理框架
1、供料系统:
通过滚筒、钩螺丝、振动盘、涡轮等方式将散乱的螺丝进行整列和排序,确保螺丝按照正确的方向和顺序排列。吹气式供料通常使用压缩空气将螺丝吹送到吸嘴或导管中,适用于轻巧且形状适合的螺丝。吸附式供料则通过负压吸附螺丝,并将其送至指定位置。
2、螺丝输送与定位:
整理好的螺丝由输送机构准确无误地输送到螺丝锁紧装置(如电动或气动驱动的拧紧枪)的前端。在这一过程中,可能包括光学或者机械传感器来检测螺丝的位置和状态,确保螺丝能够正确对准待装配的产品孔位。
3、螺丝拧紧:
螺丝拧紧机构包含旋转动力部分,即伺服电机或气缸等提供转动力矩,精确控制螺丝扭紧的扭矩和角度。当螺丝接触到产品时,会自动执行预设的拧紧程序,保证螺丝达到合适的紧固程度。
4、过程监控与质量检测:
锁付过程中,设备内置的传感器实时监测螺丝的拧紧扭矩、角度变化以及是否到位,以判断螺丝是否已正确安装并达到预设工艺要求。若发生不良状况,如滑牙、漏锁、过紧等情况,机器人会立即停止作业并报警,确保产品质量。
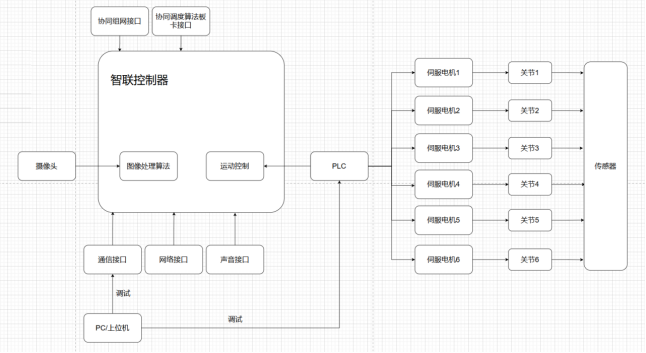
四、接线图
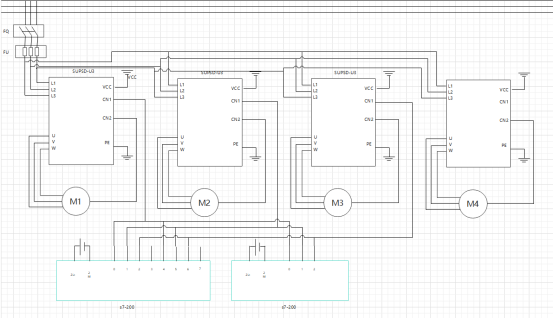
电气接线图
五、与实物接线图对应的设计原理分析计算
图像识别精度分析:像元尺寸 6.9 µm × 6.9µm,靶面尺寸 1/1.45,最大采集帧率 60 fps,动态范围 77.8dB,信噪比 43dB,增益 0dB 15 dB,曝光时间 6μs ~1 sec
12轴控制+2个虚拟轴
脉冲输出类型:方向/脉冲或双脉冲
每轴最大输出脉冲频率10MHz
24路隔离输入口(含正负限位信号,原点信号)、16路隔离输出口,输入输出均 带有LED指示灯
12路电机使能输出口,12路独立报警输入口
输入口动作有效电压:低电平(零电压)
工作环境:
工作温度:0~50℃
贮存温度:-20~80℃
湿度:5~85%,非结露
电源:24V±6V(18V-30V),2000mA
六、软件部分

机器人端口调试程序

机器人视觉控制器调试程序

用户上位机软件
在线留言

 上一篇:
上一篇: 返回列表
返回列表
