 江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
江苏迪飞斯智能科技有限公司江苏迪飞斯智能科技有限公司
机器人智联运动控制器FlexiBots Pro



 产品简介
产品简介
擦管机器人凭借其高效、安全、精准的特点,在城市排水、工业管道维护、油烟管道清洗等多个领域发挥着重要作用。擦管机器人控制器是用于控制擦管机器人的核心部件,它负责管理和执行擦管机器人的运动、操作和任务。
18852653955
一、应用场景
擦管机器人凭借其高效、安全、精准的特点,在城市排水、工业管道维护、油烟管道清洗等多个领域发挥着重要作用。随着技术的不断进步和应用场景的拓展,擦管机器人的应用前景将更加广阔。同时,不同应用场景下的擦管机器人可能具备不同的功能和特点,以满足特定领域的清洁和维护需求。
二丶主要功能
擦管机器人控制器是用于控制擦管机器人的核心部件,它负责管理和执行擦管机器人的运动、操作和任务。以下是擦管机器人控制器可能具有的一些特点和功能描述:
1. 运动控制:擦管机器人控制器能够精确控制机器人的运动,包括横向移动、纵向移动和旋转等,以确保有效的管道清洁。
2. 传感器集成:集成了各种传感器,如摄像头、激光传感器等,用于感知管道内部情况,帮助机器人导航和定位,并确保擦管作业的准确性和安全性。
3. 路径规划:根据管道结构和任务要求,擦管机器人控制器能够规划最优的清洁路径,最大限度地提高擦管效率。
4. 实时监控:能够实时监控擦管作业的进度和状态,及时发现并处理异常情况,确保作业顺利进行。
5. 自动化操作:支持自动化操作,能够独立完成擦管任务,减少人工干预,提高工作效率。
6. 用户界面:具有友好的用户界面,方便操作人员进行任务调度、参数设置和监控。
7. 故障诊断:具备故障诊断功能,能够自动检测和识别擦管机器人及控制器的故障,并提供相应的解决方案。
8. 数据记录与分析:能够记录擦管作业过程中的关键数据,如清洁时间、清洁区域等,以便后续分析和优化擦管策略。
9. 安全保障:考虑到擦管作业的特殊环境,控制器具有多重安全保障机制,确保机器人在操作过程中不会对设施或人员造成损害。
10. 通信接口:提供各种通信接口,支持与其他系统或设备的数据交换和协作,实现更高级别的自动化和集成。
擦管机器人控制器的设计旨在提高管道清洁作业的效率和安全性,同时降低人力成本和风险,为工业管道清洁领域带来更先进的解决方案。

功能架构图
三、结构组成
擦管机器人控制器的结构组成通常由硬件和软件两部分构成,这两部分共同协作以实现对擦管机器人的精确控制。
综上所述,擦管机器人控制器的结构组成是一个复杂的系统,需要硬件和软件两部分的紧密协作才能实现对机器人的精确控制。在实际应用中,还需要根据具体需求和工况进行定制和优化。
相关参数:
12轴控制+2个虚拟轴
脉冲输出类型:方向/脉冲或双脉冲
每轴最大输出脉冲频率10MHz
24路隔离输入口(含正负限位信号,原点信号)、16路隔离输出口,输入输出均 带有LED指示灯
12路电机使能输出口,12路独立报警输入口
输入口动作有效电压:低电平(零电压)
工作环境:
工作温度:0~50
贮存温度:-20~80
湿度:5~85%,非结露
电源:24V±6V(18V-30V),2000mA
四、接线图
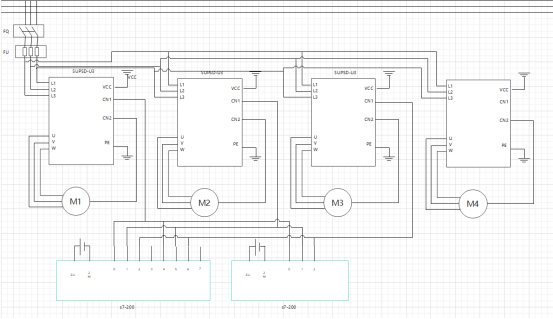
电气接线图
五、与实物接线图对应的设计原理分析计算
1)通讯速率
S7-200 CPU的通讯口默认处于PPI从站模式,地址为2,通讯速率为9.6K。如果需要更改通讯口的地址或通讯速率,必须在系统块中的“Communication Ports”(通讯端口)选项卡中进行设置,并将更改后的系统块下载到CPU中才能生效。
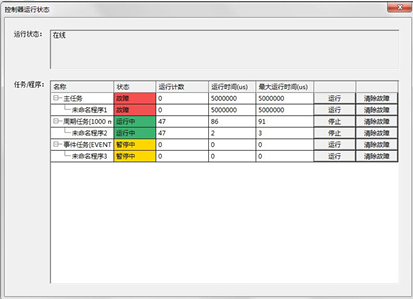
2)CPU运算速度
运算速度:S7-200 PLC的CPU运算速度非常快,可以达到0.37us/位(这一数据可能因不同型号或系列而有所差异,但总体上S7-200以其高速运算能力著称)。
指令丰富:S7-200 PLC拥有丰富的指令集,包括浮点运算、指针运算、中断处理、通讯响应、PID控制、PWM脉冲输出等多种功能,这些指令的执行速度也非常快
3)A/D、D/A转换速率
S7-200 PLC的模拟量模块具有高速的A/D(模拟到数字)和D/A(数字到模拟)转换能力。一个模拟量模块通常带有3路A/D和1路D/A通道,其转换速度可以达到125us,这为系统的高精度采样和控制提供了有力支持。
4)定位限位精度
对控制机器人传感器定位限位精度造成影响的因素,大致分为统误差、随机误差和粗大误差。系统误差是设备本身固有的,可以通过校准和补偿来减少;随机误差由不确定性因素引起,可以通过统计方法处理;粗大误差则是由异常或故障引起的,需要通过软件滤除或硬件修复;除此以外,传感器具有更高的精度,这也大大提升了定位限位精度。
5)控制精度分析
伺服电机是一种能够精确控制位置、速度和加速度的电机,它通常用于需要高精度和快速响应的自动化系统中。SM-M4和130ST伺服电机通过接收来自控制器(如PLC或伺服驱动器)的信号来调整其输出,以实现对机械部件的精确控制。
六、用户软件
机器人控制器调试软件
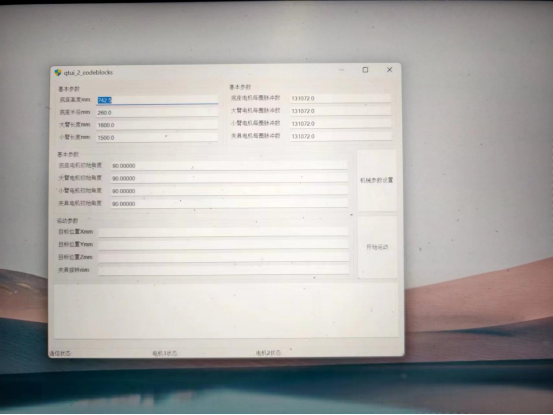
用户上位机软件
打开操作界面,待其启动后将自动加载并显示操作界面,点击“设置初始参数”按钮修改设置底盘高度等初始参数。初始参数设定完毕后,确保准备工作无误,在“运动参数”栏填写所需要进行的运动坐标。点击“开始运动”按钮以启动或停止过程,查看指示灯以了解系统状态等。
在线留言

 上一篇:
上一篇: 返回列表
返回列表